Unitree Go2 Robot Jailbreak
For a while, I was looking for a nice robotic platform to develop human robot interaction applications. I found the […]
Unitree Go2 Robot Jailbreak Read More »
For a while, I was looking for a nice robotic platform to develop human robot interaction applications. I found the […]
Unitree Go2 Robot Jailbreak Read More »

I recently attended ROSCon 2024 in Odense, Denmark, where I explored new robotics tools, software, and innovations. It was an amazing experience filled with insightful talks, workshops, and networking with fellow robotics enthusiasts.
Notes from ROSCon 2024 in Odense, Denmark Read More »
This tutorial should serve as quick starting guide on how to setup your Rock board. In the case of my
Radxa ROCK-5B Setup for ROS2 Docker Read More »
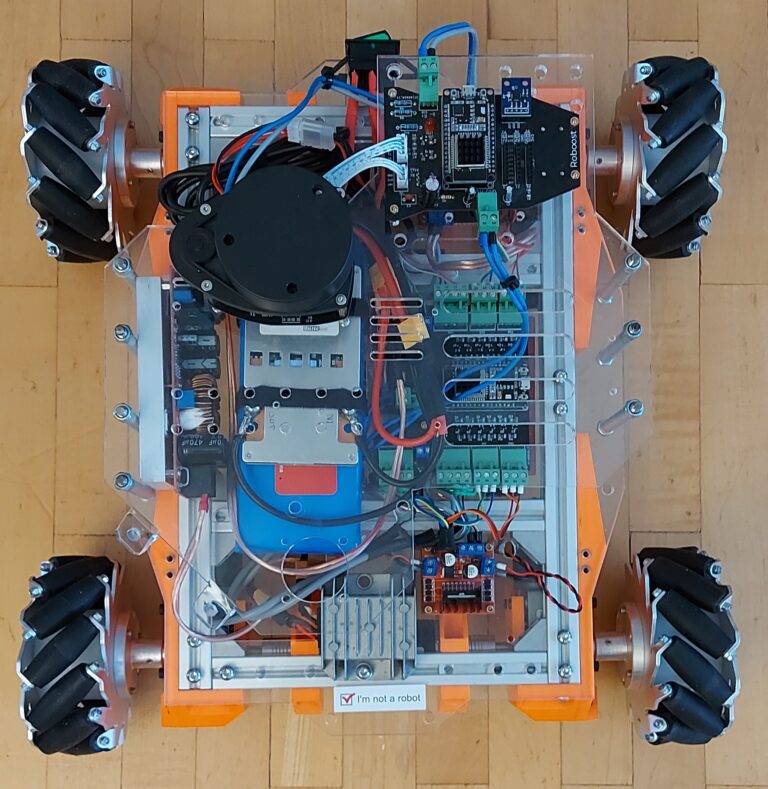
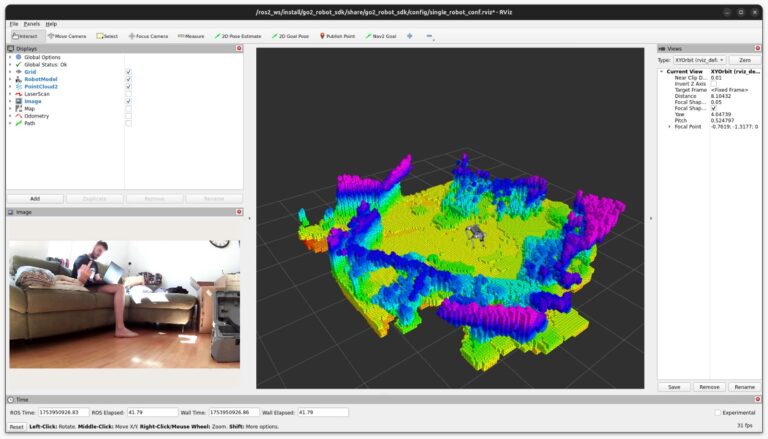
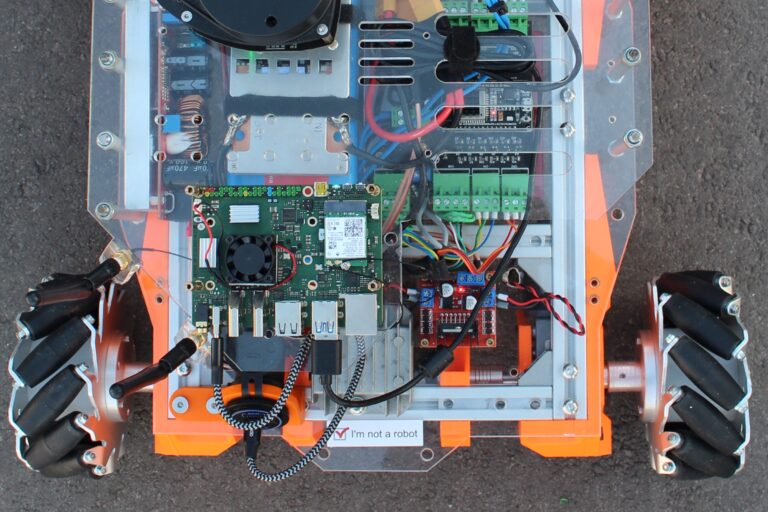
In this post, I want to showcase the newest update on the Roboost software. I will give a short overview
Roboost – Primary Motor Cortex Read More »

What is ROS and why would you want to run a micro version of it on an ESP32? ROS is
micro-ROS on ESP32 [tutorial] Read More »
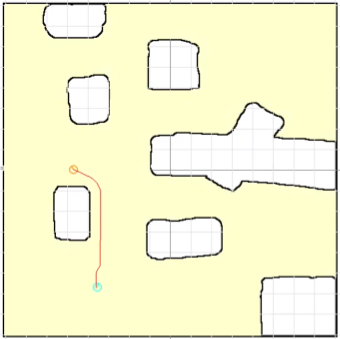
In this post, I want to make a little code review for a global A* planner I’ve written for a
A* Path Planner for Mobile Robots Read More »