Unitree Go2 Robot Jailbreak
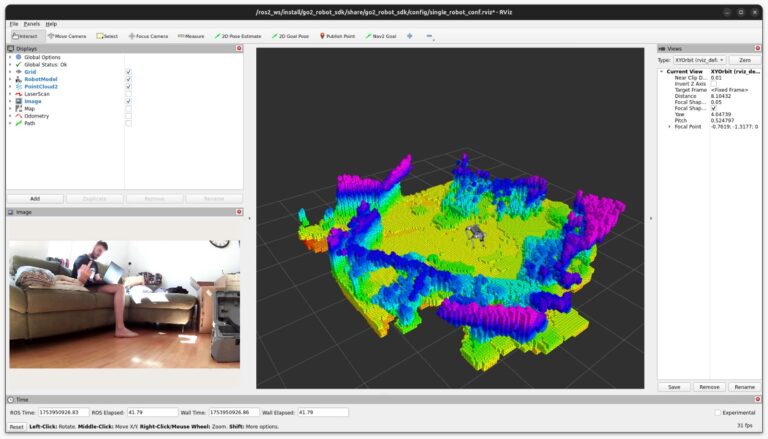
For a while, I was looking for a nice robotic platform to develop human robot interaction applications. I found the […]
Unitree Go2 Robot Jailbreak Read More »
For a while, I was looking for a nice robotic platform to develop human robot interaction applications. I found the […]
Unitree Go2 Robot Jailbreak Read More »
Hi, my name is Eduard. I am a student of Environmental Engineering at TU Wien and am currently pursuing my
Hi, just an ordinary masters student of TU Wien passing by! I was certainly not being pressured or held at

I recently attended ROSCon 2024 in Odense, Denmark, where I explored new robotics tools, software, and innovations. It was an amazing experience filled with insightful talks, workshops, and networking with fellow robotics enthusiasts.
Notes from ROSCon 2024 in Odense, Denmark Read More »
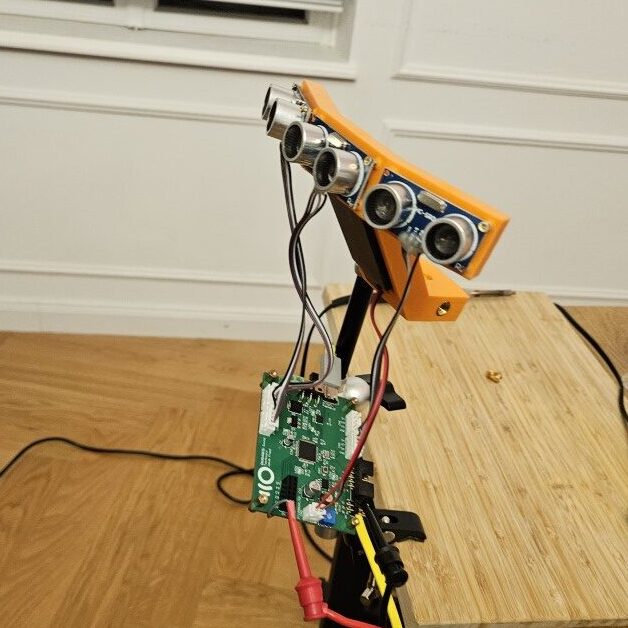
Revisit of a project for adding ultrasonic distance feedback to a motorized wheelchair. Plus custom PCB!
Ultrasonic Assistance for Wheelchairs Read More »
Hi everyone, I’m a robotics software engineer from Poland, currently based in Vienna. Currently I mostly work with open source
My brain dump on the future of robotics…
Emotional Intelligence In Robotics Read More »
A summary of C++ specifiers and attributes
C++ Cheatsheet for Embedded Systems Read More »
This tutorial should serve as quick starting guide on how to setup your Rock board. In the case of my
Radxa ROCK-5B Setup for ROS2 Docker Read More »
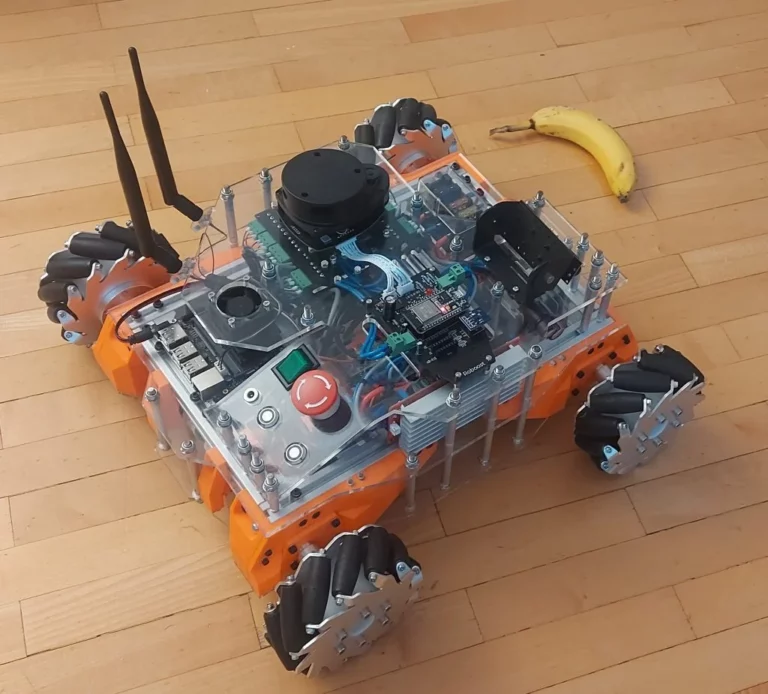
In this post, I want to showcase the newest update on the Roboost software. I will give a short overview
Roboost – Primary Motor Cortex Read More »

What is ROS and why would you want to run a micro version of it on an ESP32? ROS is
micro-ROS on ESP32 [tutorial] Read More »
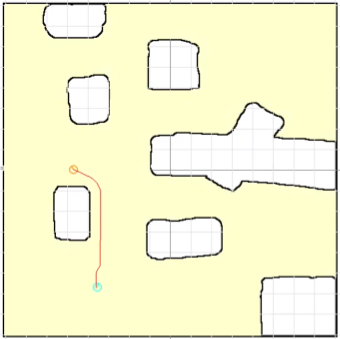
In this post, I want to make a little code review for a global A* planner I’ve written for a
A* Path Planner for Mobile Robots Read More »

In this post, I just quickly wanted to showcase my very first mobile robot. It was built for my informatics
First Mobile Robot [mini-project] Read More »
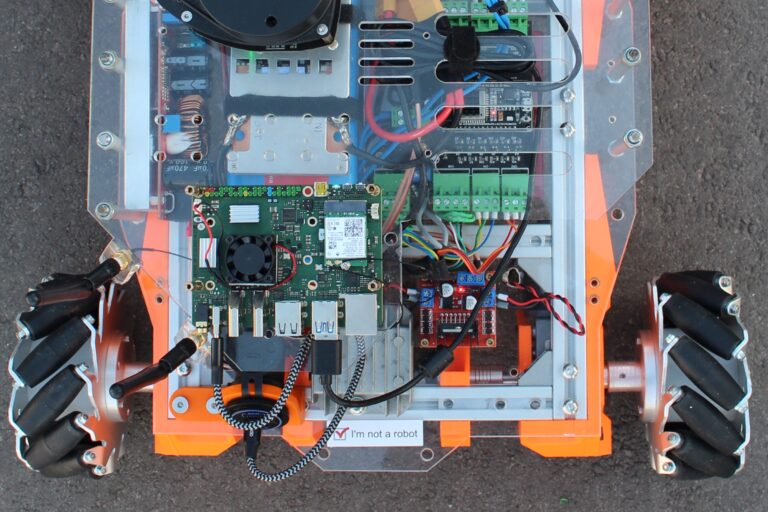
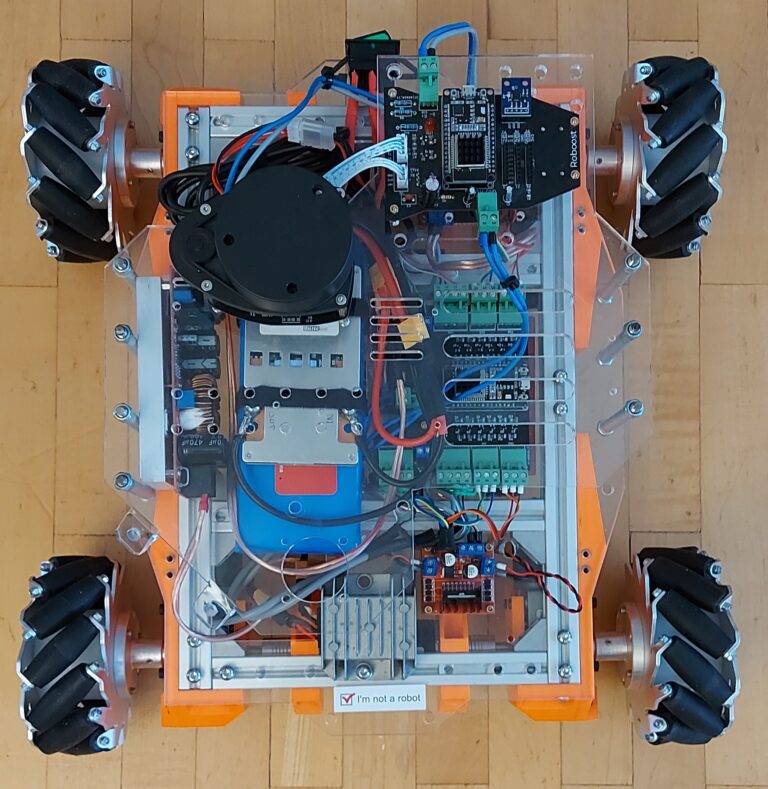
Version 2 of my Roboost project! As you’ve seen in the previous post, the former version had quite a few

Hey there! My name is Jakob and I’m a co-founder the Technology Hub Vienna. My main project is Roboost, an
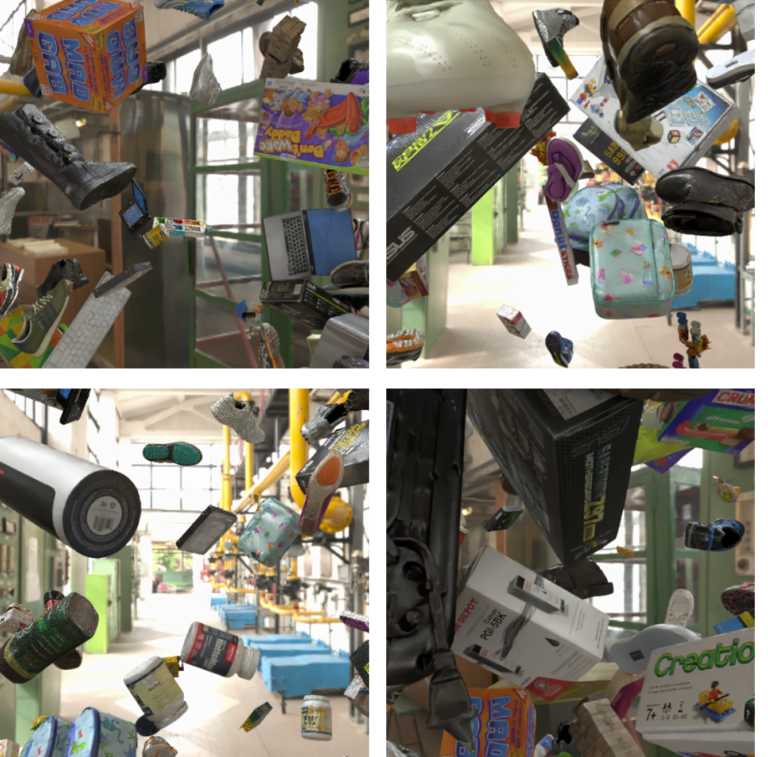
In this article, we describe how to use DOPE, a deep neural network for 6-degree-of-freedom (6DoF) object pose estimation. We provide step-by-step instructions for installing and using DOPE to estimate the pose of objects in 3D space. This technique is useful for a variety of applications, including robotics and augmented reality.
6DoF pose estimation using DOPE Read More »